")
")

Equipe systèmes mécaniques
- Modélisation des systèmes mécatroniques
Ce thème est développé en collaboration avec l’équipe de l’Ingénierie numérique du Laboratoire Quartz sous la direction par Professeur Jean-Yves Choley. Deux thèses en cotutelle sont en cours
Thèse 1 : Prise en compte de la sûreté de fonctionnement lors du choix d’architectures des systèmes complexe
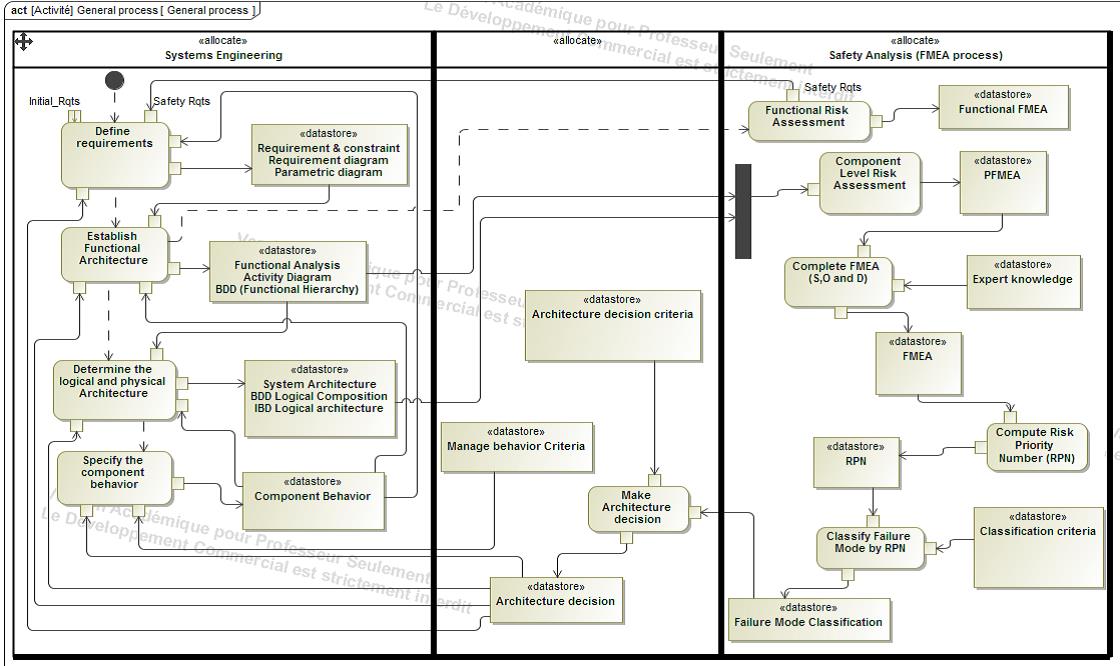
Les contraintes de la sûreté de fonctionnement pour les systèmes multidisciplinaires doivent être prises en compte dès la phase de conception et plus précisement dans la phase de la définition de l’architecture du système. L’intégration du MBSA (Model-Based Safety Assessment) avec le MBSE (Model-Based System Engineering) a permis de générer systématiquement un modèle primaire de FMEA ( Failure Mode and Effects Analysis) et FTA (free Tree Analysis). Cependant l’absence du lien entre ces analyses et le modèle système ne permet pas la prise en compte des contraintes de sûreté de fonctionnement au début de la conception. Ce retard peut s’avérer couteux une fois les défauts de fonctionnement sont détectés tradivement.
L’objet de cette thèse est d’évaluer les conséquences de chaque défaut potentiel et de prévoir une solution à ce défaut lors de la phase de conception. La méthodologie choisie est de se baser sur l’ingénierie système (IS) et le langage de modélisation des systèmes SysML pour traiter systématiquement les FTA et Les FMEA d’un système multidisciplinaire et générer des solutions aux défauts potentiels ainsi qu’effectuer les modifications nécessaires sur les différents diagrammes du SysML pour les intégrer dans l’architecture conçue.

Thèse 2 : Contribution à l’analyse de cohérence des modèles système, multiphysique et sûreté de fonctionnement
Le processus de conception des systèmes complexes implique l’utilisation de langages et outils différents pour la modélisation et la simulation de leurs structures et de leurs comportements : modèles système (par exemple avec SysML), modèles de pré-dimensionnement multi-domaines et multi-physiques (par exemple avec Modelica, Simulink), modèles 3D (Catia) et modèles sûreté de fonctionnement (par exemple avec Model Checking, FMEA, FTA et des langages tels que Altarica). La conséquence principale en est un risque fort d’incohérence entre les différentes vues du système. Actuellement, cette cohérence est assurée sans support numérique par les experts des différents domaines, sans garantie formelle de cohérence. Une solution consiste à utiliser les transformations automatiques de modèles mais dès que la complexité du système devient non négligeable, les modèles obtenus sont souvent soit incomplets, soit pollués par des informations superflues. Une solution pragmatique consisterait à vérifier cette cohérence a posteriori afin que les différents concepteurs puissent corriger leurs modèles en conséquence. Cette dernière voie n’a que très peu été évaluée scientifiquement.
Afin de garantir la cohérence des différents modèles d’un même système pour en formaliser la structure et le comportement, il s’agit de définir les solutions théoriques et formelles permettant de détecter et de mettre en évidence les incohérences entre les différentes vues du système, avec propositions de solutions devant être prises en compte par les concepteurs chargés de réaliser les différents modèles.
Thème 2 : Etude des robots parallèles
Synthèse dimensionnelle sphérique:
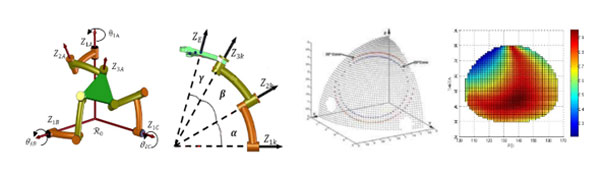
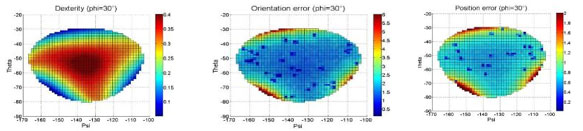
- Le manipulateur parallèle sphérique (SPM) 3-RRR étudié fait partie d’une interface haptique pour une opération chirurgicale mini-invasive.
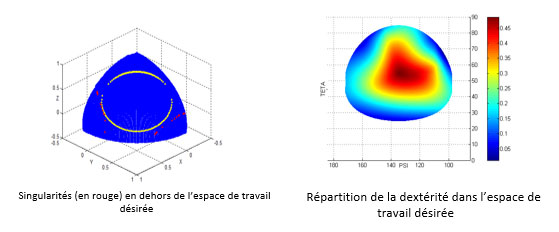
- Il s’agit d’optimiser les 3 angles de chacune des trois jambes du robot en vue d’obtenir un mécanisme capable d’assurer l’espace de travail désiré qui est un cône de centre le robot et d’angle au sommet de 60° et de Maximiser la dextérité le long de cet espace de travail. Les résultats obtenus (figures ci-dessous) ont abouti à un espace de travail contenant des zones de bonne dextérité (en rouge) alors que cette dextérité diminue en s’approchant des zones de singularité qui sont les deux petits cercles blanc.

- La présence des positions singulières à l’intérieur de l’espace de travail désiré affecte la commande en vitesse du robot. Pour les éviter, une deuxième optimisation a été lancé pour éviter ce problème. Il s’agit d’introduire le critère de non singularité à l’intérieur de l’espace de travail désiré.

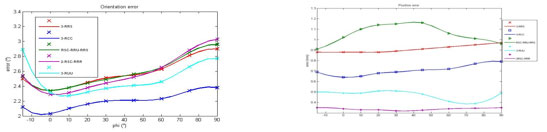
- Si les jeux permettent de résoudre le problème de montage des mécanismes hyperstatiques, leur présence ainsi que les erreurs de fabrication dans le cas des mécanismes isostatiques affectent leur précision des déplacements. Pour voir le problème de tous ces cotés nous avons essayé d’apporter une évaluation des effets des jeux et des erreurs de fabrication sur la précision du déplacement d’un RPS isostatique. Dans ce travail, nous avons essayé de voir si les erreurs de fabrication ont le même effet sur les différentes versions isostatiques du SPM et quel effet combiné des jeux et des erreurs sur le 3-RCC. Ainsi nous avons modélisé les erreurs de fabrication et les jeux comme des torseurs des petits déplacements. Ceci nous a permis d’obtenir un modèle géométrique linéaire du mécanisme à partir des équations de fermeture des cycles indépendants. Les inconnues de ce système linéaire sont les petits déplacements des liaisons en fonction des torseurs des erreurs de fabrication et des jeux données. Une méthode probabiliste a été utilisée pour évaluer les erreurs de déplacement de la plateforme mobile du robot. Dans ce cadre un premier travail de comparaison de la précision des 4 versions isostatiques du RPS issus de la littérature. Le 3RRS, 3RSR, 3RUU et le 3RCC. Ce travail a montré qu’à 95% des résultats obtenus les erreurs en orientation et en translation de la plateforme mobile sont différentes. Ce qui prouve que le comportement de ces versions n’est pas le même.

- Pour l’étude des effets combinés des erreurs et des jeux sur le 3-RCC nous avons montré qu’il existe une correspondance entre les zones de dextérité faible et les zones des erreurs élevées en orientation et en translation. Nous avons montré aussi que la répartition des résultats obtenus est asymétrique par rapport à la valeur moyenne des erreurs. Nous avons montré aussi que le principe de superposition des effets de jeux et des erreurs de fabrication n’est pas vérifié.

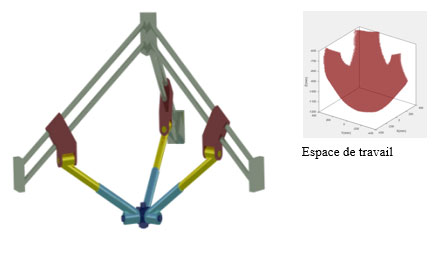
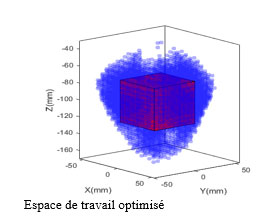
Synthèse dimensionnelle d’un translateur
- Notre étude consiste à optimiser les paramètres géométriques du translateur le tripyramide en partant d'un espace de travail prescrit. Nous proposons une approche d'optimisation multi-objectifs basée sur la méthode des algorithmes génétiques qui vise à minimiser l’espace de travail de ce manipulateur et maximiser la dextérité globale. Ce travail vient dans une approche plus générale de comparaison des performances de plusieurs translateurs en vue de prescrire le même espace de travail désiré.
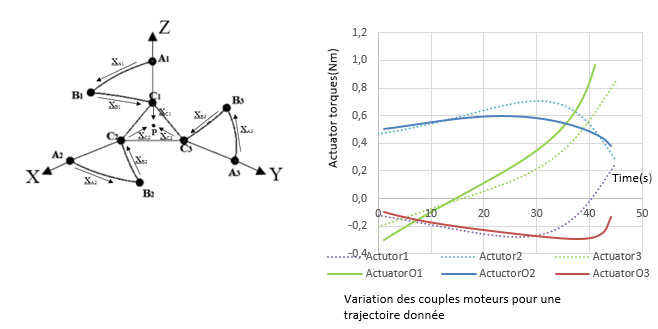
Modèle dynamique du robot 3-RRR:
- Dans ce travail on s’intéresse au développement du modèle dynamique du robot sphérique 3-RRR pour permettre sa commande en force. Pour obtenir ce modèle nous avons utilisé deux méthodes, la méthode de Lagrange et la méthode d’Ozgür basée sur la méthode de Kane. Le but est de choisir une méthode qui s’adapte le mieux avec les robots sphériques. Les résultats obtenus sont très proches.
Thème 3 : Biomécanique :
Thème 4 : Modélisation des véhicules à deux roues (V2R) :
- L’objectif général de ce travail est le renforcement de la sécurité des véhicules à deux-roues motorisés (V2R). Dans ce contexte, deux modèles sont développés, un modèle numérique et un modèle analytique. Le modèle numérique du système moto-pilote-route, réalisé dans environnement de Co-simulation (ADAMS/Simulink), est conçu pour évaluer le comportement réel du système pour certains manouvres (virage, changement de voie..). Ce modèle numérique est composé d’un modèle multi-corps du système (pilote + V2R) et d’un contrôleur sous forme d’un simple régulateur PID pour simuler les actions de pilote.
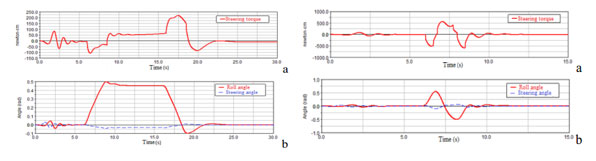
(a)Couple de braquage. (b) Evolution des angles
(a)Couple de braquage (b) Evolution des angles de roulis et braquage (virage en « U ») de roulis et braquage (changement de voie)
- Le deuxième modèle est analytique. Il est développé en considérant la moto comme étant un robot mobile.
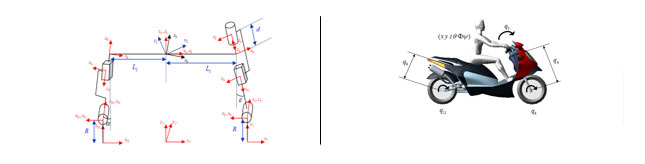
Modèle articulaire de V2R
- Ces modèles sont utilisées pour l’optimisation des paramètres de conception du système de suspension semi-actif ainsi que l’adaptation des systèmes de sécurités qui existent dans les véhicules légers aux spécificités des V2R motorisés.
- Deux stratégies de base sont utilisées pour contrôler le système de suspension semi-actif, le skyhook continu et le skyhook modifié. En utilisant le modèle développé, une procédure d’optimisation multi-objectifs, basée sur la méthode de l’algorithme génétique (NSGA-II), est proposée. L'objectif est d'optimiser les paramètres des deux lois de contrôle des systèmes de suspension afin d'améliorer la sécurité et le confort de roulement. Pour étudier l'efficacité de cette approche, les résultats de l'optimisation sont utilisés dans différentes simulations et sont comparés à ceux obtenus à partir d'une simulation d'un V2R équipé d'un système de suspension passif. Les résultats montrent que les deux stratégies de contrôle du système de suspension semi-actif apportent une amélioration par rapport au système de suspension passive. De plus, les résultats d'optimisation multi-objectifs montrent que «Skyhook modifié» garantit une sécurité de conduite plus élevée, alors que le «Skyhook continu» garantit un niveau de confort de conduite plus élevé.
